Introduction¶
OpenPTV is the abbreviation for the Open Source Particle Tracking Velocimetry consortium. The core of this software is the 3D-PTV software originally developed at ETH Zurich. The consortium of the academic institutions is working on improving the core algorithms, developing a stand-alone library with a simpler and clear API. We also develop the new user interface in Python, that started at the Tel Aviv University. Read more about the consortium on our website http://www.openptv.net
In the future we would like to allow everyone to add their algorithms to the OpenPTV
library, named liboptv and develop several interfaces, combining it with the pre-
and post-processing routines using Python/NumPy/SciPy/PIL/Matplotlib/etc. See the existing repositories on http://github.com/OpenPTV
About the 3D-PTV measurement method¶
Objectives of the 3D-PTV experimental method¶
We are convinced that the three-dimensional tracking method that provides otherwise inaccessible information about the flow can make an impact in various applications, allowing for the researchers and industry to get a deeper insight into their flows. Most of the flows are highly complex and turbulent and only a few of them can get a limited low-dimensional or analytical description that explains the different flow phenomena. Experimental research is inevitable in observing the flow and discovering new phenomena, in addition to assisting to explain the old ones.
Introduction¶
The 3D Particle Tracking Velocimetry (3D-PTV) offers a flexible technique for the determination of velocity fields. It is based on the visualization of a flow with small, neutrally buoyant particles and stereoscopic recording image sequences of the particles. During the 80’s-90’s the successful research work performed by the Institute of Geodesy and Photogrammetry at ETH Zurich led to an operational and reliable measurement tool used in hydrodynamics and space applications. In cooperation with the Institute of Hydromechanics and Water Resources Management at ETH Zurich, further progress has been achieved in the improvement of the existing hard- and software solutions. Regarding the hardware setup the acquisition system used at ETH Zurich was upgraded from offline to online image digitization.
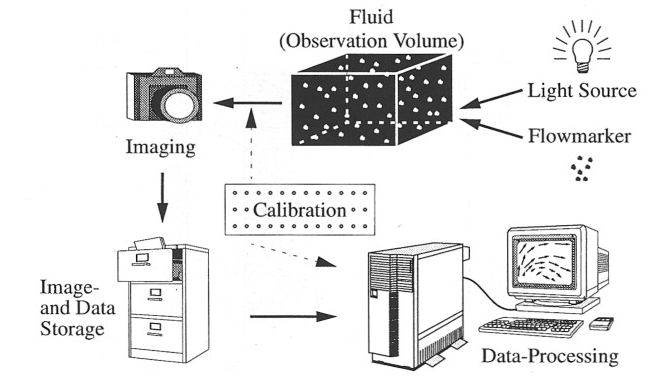
Data acquisition¶
Seed a flow with tracer particles
Illuminate a 3-D observation volume inside the flow by a pulsed light source
Image the scene by 2 (or rather 3-4) synchronized
Length of image sequences depending on imaging rate and storage device
The system used at ETH Zurich was upgraded from offline to online image digitization. In the previous system, the image sequences were first recorded on analogue videotapes and digitized afterwards, while in the new system, two frame grabbers (Matrox Genesis) are used to provide online digitization and storage. The length of the recorded digital image sequences is nowadays restricted by the storage device’s capabilities. The data rate for a 60 Hz full-frame camera with a resolution of 640 x 480 pixels is about 19 MB/sec, and hence in an experiment which lasts for 1 minute, four cameras deliver a total amount of about 4.5 GB image data.
The Particle Tracking Velocimetry software performs the following tasks:
Calibration of the multi-camera system (determination of camera exterior and interior orientations, lens distortion and further disturbances, (e.g. Willneff and Maas, 2000) and the exact geometric modelling (“multimedia geometry” - each beam from a particle to the sensor passes the three optical media water, glass, air with different refractive indices, which leads to a twice-broken beam).
Image preprocessing: perform highpass filtering due to non- uniformities in the background illumination
Detect particles in the images by a modified thresholding operator, localize particles with subpixel accuracy by a centroid operator
Establish stereoscopic correspondences
Determine 3-D particle coordinates
Storage of all relevant object and image space information
Perform tracking in 2D image and 3D object space
Data Processing¶
Image preprocessing: perform highpass filtering due to non- uniformities in the background illumination
Detect particles in the images by a modified thresholding operator, localize particles with subpixel accuracy by a centroid operator
Establish stereoscopic correspondences
Determine 3-D particle coordinates
Storage of all relevant object and image space information
Perform tracking in 2D image and 3-D object space
A crucial point is the handling of ambiguities occurring in different steps of the data processing chain:
Particles may overlap in the images. For that reason a modified thresholding/centroid operator was developed to search for local maxima in the images and dividing particle images at local minima under certain conditions.
Because particle images cannot be distinguished by features like size, shape or colour, the only criterion for the establishment of stereoscopic correspondences is the epipolar line. Ambiguities occur when multiple candidates are found in a search area defined by the epipolar line. These ambiguities can only be solved if a third (or even a fourth) camera is used.
Ambiguities may also occur in the tracking procedure. Criteria like local correlation and smoothness of the velocity field are employed to solve these criteria.
Another important issue is the accurate calibration of the system (determination of camera exterior and interior orientations, lens distortion and further disturbances) and the exact geometric modelling (“multimedia geometry” - each beam from a particle to the sensor passes the three optical media water, glass, and air with different refractive indices, which leads to a twice-broken beam).
Potential¶
Truly 3-D technique: all three components of the velocity field are determined in a 3-D observation volume
Delivers 3-D vector field for Eulerian analysis plus 3-D trajectories for Lagrangian analysis
A system based on 4 CCD progressive scan cameras (digitized to 640 x 480 pixels) is capable of tracking more than 1000 particles
The relative accuracy of the velocity vectors is ~ 1:4000 of the field of view
Real-time image processing schemes¶
Collaboration¶
See also¶
References¶
Maas, H.-G., 1992. Digitale Photogrammetrie in der dreidimensionalen Strömungsmesstechnik, ETH Zürich Dissertation Nr. 9665
Malik, N., Dracos, T., Papantoniou, D., 1993. Particle Tracking in three-dimensional turbulent flows - Part II: Particle tracking. Experiments in Fluids Vol. 15, pp. 279-294
Maas, H.-G., Grün, A., Papantoniou, D., 1993. Particle Tracking in three-dimensional turbulent flows - Part I: Photogrammetric determination of particle coordinates. Experiments in Fluids Vol. 15, pp. 133-146
Srdic, Andjelka, 1998. Interaction of dense particles with stratified and turbulent environments. Ph.D. Dissertation, Arizona State University.
Lüthi, B., Tsinober, A., Kinzelbach W. (2005)- Lagrangian Measurement of Vorticity Dynamics in Turbulent Flow. Journal of Fluid Mechanics. (528), p. 87-118
Nicholas T. Ouellette, Haitao Xu, Eberhard Bodenschatz, A quantitative study of three-dimensional Lagrangian particle tracking algorithms, Experiments in Fluids, Volume 40, Issue 2, Feb 2006, Pages 301 - 313.
Kreizer Mark, Ratner David and Alex Liberzon Real-time image processing for particle tracking velocimetry, Experiments in Fluids, Volume 48, Issue 1, pp.105-110
Meller, Y. & Liberzon, A., (2016). Particle Data Management Software for 3DParticle Tracking Velocimetry and Related Applications – The Flowtracks Package. Journal of Open Research Software. 4(1), 23.